
I grew up on a diet of thick World War II history books, with a particular fascination with the technology of the war. Many things about it fascinated me, but it always felt a thing of the past. War happened in my childhood, on the other side of the world from me, mostly against small bands of various flavors of nutcases, which is to say, not something I felt much directly. I grew up in a generation that believed that the end of the cold war and real time global connections might actually mean global peace, no major wars in developed countries, was actually possible for a long time to come. That all changed when Putin, for reasons that are basically him desiring for people to read books about him with as much fascination as I did with the the second world war, invaded Ukraine (I am not sure why any sane person would want to be ranked alongside the butchers that were Hitler and Stalin, but looks like he got his wish). I had spent several months in Ukraine just a year before the war started, and seeing videos of bombs falling on streets I had walked suddenly made the whole war thing real.
There were various things I tried to do and help. One of them was to design a missile. Not an actual explosive, just a proof of concept model. Being a data scientist, I looked for ways that AI could be used to help a defender protect themselves. It’s actually much harder than most people think to design killer AI weapons. In fact, it is almost impossible, there are simply too many complexities and too much evolution on a battlefield for the Terminator style killer robots, or whatever evil automaton, to be created. Humans end up being cheaper, more adaptable, and integrate well with all our other existing tools and communications. Technology systems will certainly become increasingly deeply integrated and more complex but not autonomous, humans will still be there – Old Man’s War more than Skynet.
Autonomous systems exist within a niche, and I thought I spotted one niche that might be useful to Ukraine, the autonomous ambush missile. I am not aware of any proposals for such a device, but the niche is very similar to that of smart mines, which are being/have been developed.

The ‘Autonomous Ambush Missile’ (AAM) concept:
- A standard anti tank rocket and warhead as the base
- A camera in the nose (where a fuse often is, might need a unique fuse)
- A low power computer (possibly with a dedicated NPU/accelerator) running object detection (customized YOLO or similar)
- Guidance fins and/or thrust vectoring, and an ignition circuit for a solid fuel motor.
Usage:
- Missile is placed and used like a mine, but with a much wider coverage area than a single mine. Area is still significantly limited by view area and resolution of camera – can only reliably detect objects in a wide area at short range, or a narrower and more distant area with a longer lens.
- Power is an internal battery. That might last for a few days at most, depending on size. For longer use, external breakaway power cord could be used. A dark, medium sized solar panel would likely be sufficient and stealthy enough.
- Targets could be armored vehicles and low flying helicopters. Theoretically any visually distinct object type, such as a motorcycle, would be a possible target.
- When a valid target is detected and double-checked with internal constraints and multiple image frames, the rocket launches itself and aims itself toward the identified object.
- Boom
Challenges:
- Friend from foe identification could be better than a traditional mine, but still challenging. Some signals, like a large red cross on a white background, could be automatically excluded from targeting (assuming they are clearly visible from the angle the camera has). Activate/deactive signals or specific patterns marked as friendly could all be used, but have clear limitations (like being jammed, being obscured, etc).
- Camouflage might be too effective against vision-based systems. Nighttime is a no go. Thermal cameras might get around that but are much more expensive, especially for higher resolution versions, and require a custom data training set.
- Can’t target weak areas specifically very well, generally would be more “aim for the center of mass” which may not be effective with a small warhead.
- To be most effective, would need to be tweaked and retrained iteratively in a tight loop with combat experience, which is difficult.
By the time I had put enough of this together, FPV drones had already begun to be widely adopted on the battlefield. FPV drones are perhaps better in most ways, particularly in their ability to target weak areas more specifically. This AAM system might still have a role, generally of more use to a defender than an attacker. In particular, it being autonomous and standalone could operate largely immune to most forms of electronic warfare. Ultimately humans are also immune to electronic warfare, and could really do the same job with an RPG. Also, we tend to be much more understanding of human failures than we are of computer failures. Western militaries will probably want more reliable and more expensive tech than this, and poorer countries would generally find it easier to throw people at the same problem.
Hence why I am no longer working on this concept. However, I did go decently far down the route of building a proof of concept.
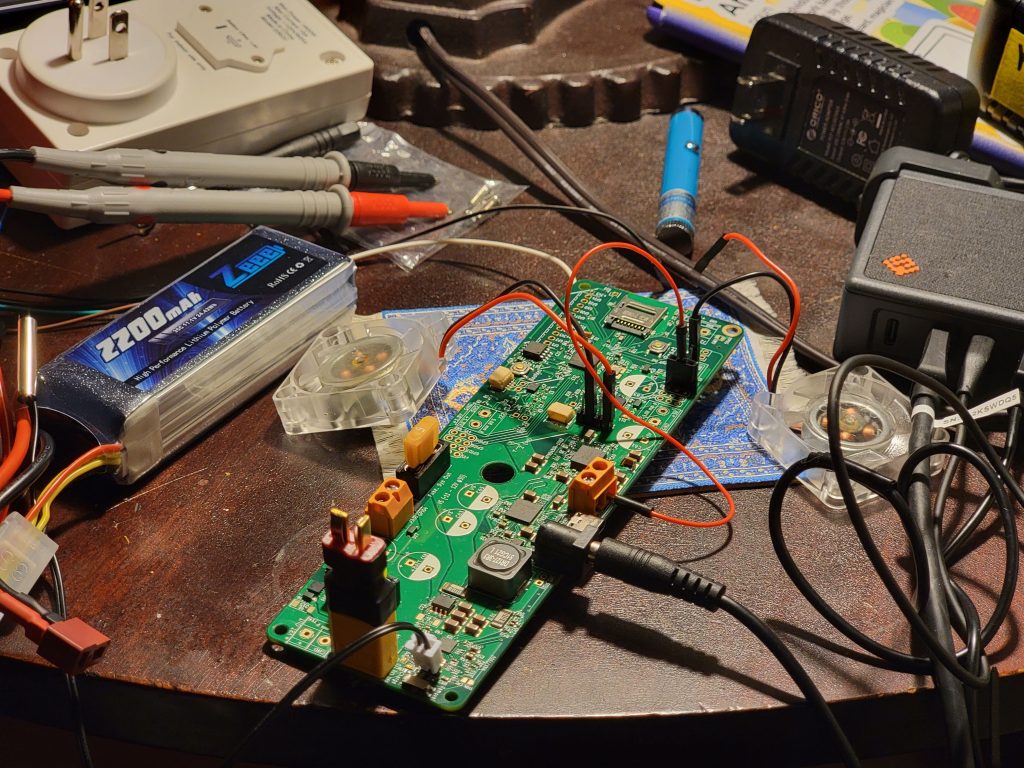
When it comes to putting together a proof of concept for the AAM system, the hard part, to my initial surprise, is the power management. The actual object detection based target detection, the basic rocket parts, and the guidance are all relatively easy (and I had relevant experience), at least in a basic version (with a lot of fine tuning needed to get a polished production grade version). However, the system needs power for the control servos, power for the machine vision camera and computer, power for the sensors, and power for engine ignition. These all require different voltages, and need a decent bit of power, especially engine ignition. Also, it needed to be rechargeable, as the idea is that this system might sit with external power for weeks or months. You can cobble together a mix of off-the-shelf parts to do this, but fitting all that in a small space in a way that can withstand sharp acceleration and field abuse, not so much.
Which is how I ended up learning electronics and designing a printed circuit board (PCB) to do all this.
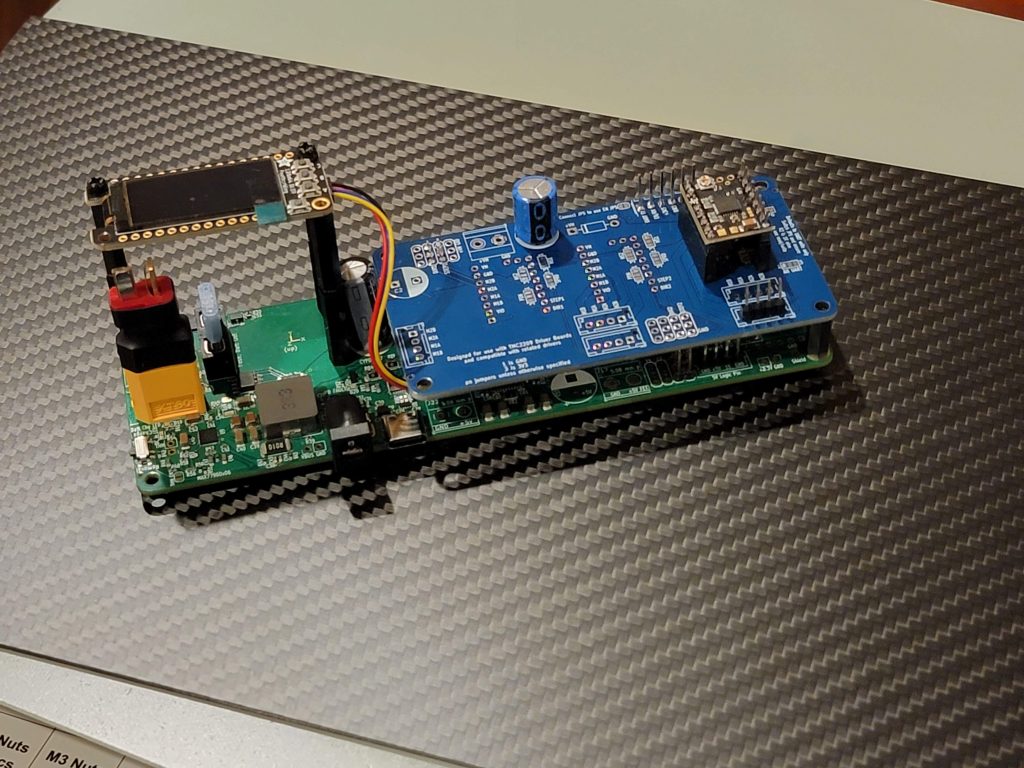
I will leave the GitHub page and the Hackaday page to tell more of the technical details. As I became unsure of the value of the AAM, I developed the Sirith Pico into a board with more general purpose uses in mind as well.
The process was immensely time consuming. I spent hours reading through datasheets of integrated circuits and researching which products would work, amidst the great covid component shortage. Also lots of reading in books and online about electronic circuits – that unit of physics in college was a blur at the time, now I would be much better at it. Then there was learning the free, open-source design software that is KiCAD to both design the schematic and layout the board. Schematics require knowing lots of esoteric knowledge as well as not missing any sentence in the product’s often 100-page-long datasheet. Circuit layout is not so different that a jigsaw puzzle, one with a few more rules and (sometimes) a bit of flexibility in how the final picture comes out. Then ordering is a challenge too, needing to confirm all the hundreds of parts match.
It took hundreds of hours, two paid expert reviews, and seven manufactured revisions at about $250 per revision, to get it all working.
What I have now is a do-it-all robotics board capable of medium power activities that I am immensely proud of but that I don’t have an immediate need for. I was thinking of selling a production run of the board, it certainly would be a useful product to others, but as other project ideas flooded my mind, I ended up going with open sourcing this instead, to save time.
Some other uses for this board:
- A simple fixed wing drone, with dc motor powered by the battery out mosfet
- A machine learning controlled airsoft turret, with the airsoft gun motor powered directly from the battery out mosfet (I actually started this, but shelved it as being not worth the time). I do wonder if a ML-controlled high power airsoft gun might not work as a relatively safe anti-drone device.
- A large solar charger capable of running a Raspberry Pi, able to shut off power to the Pi at intervals using the 5V mosfet and serve as a real time interface for any tasks (it would be overkill, but a machine learning based chicken coop door comes to mind as an example, that opens a coop door only for chickens)
- Solar powered or battery-backup outdoor wifi camera capable of rotating and tracking objects
- Interactive, solar powered art installations (or Halloween/Christmas decorations)
I have no regrets about this project, mainly because of the skills I gained from the effort. Being able to design with both electronics and AI, that is a powerful combination of skills to have. I have already shared some of my smaller, later projects (solar business card, sun lamp), and there is more to come!
Colin Catlin, January 1st, 2025